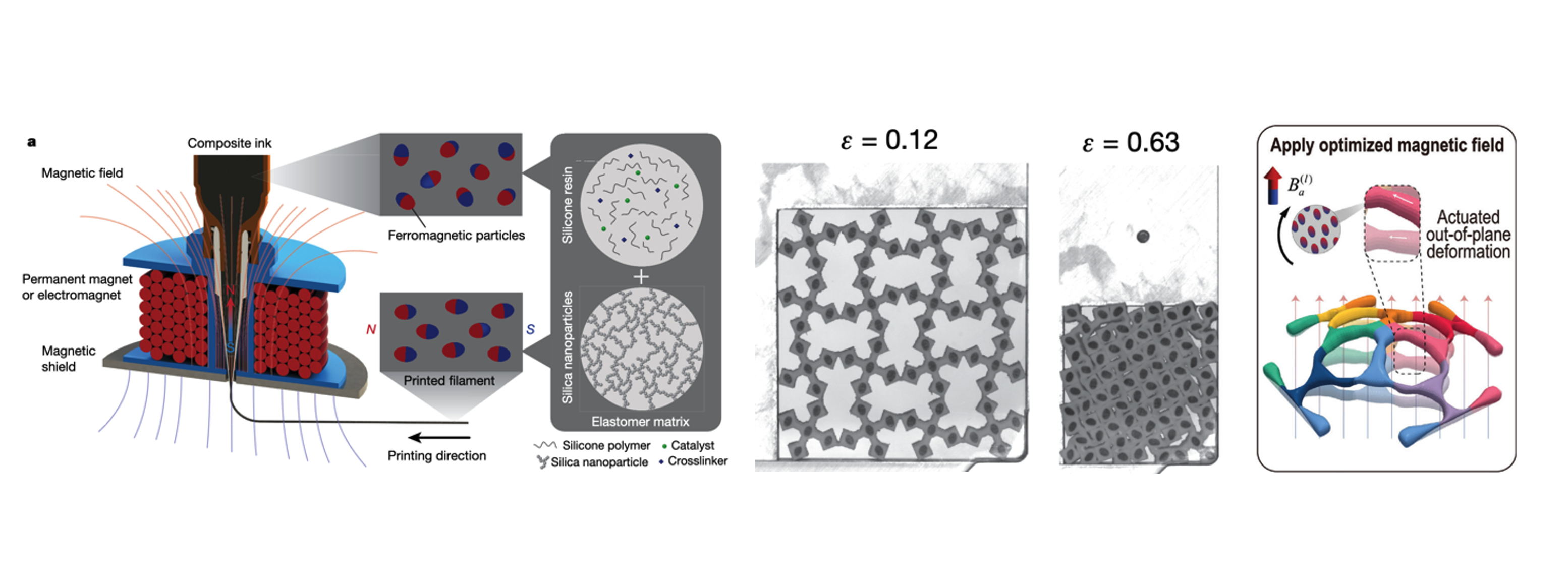
Mixing neodymium ferromagnetic microparticles with silicone rubber resins allows for creation of a 3D printable soft magnetic material. During printing, schematically indicated in the Figure (left), see also [1], a small coil placed at the dispensing nozzle orients magnetic particles along the applied magnetic field, producing a permanent magnetization profile in the printed specimen. Changing either the orientation of the coil’s field or changing the printing direction enables programming of the resulting print (i.e., orientation of the magnetic particles). Upon curing and application of an external magnetic field, magnetically programmed specimens deform in accordance with the intended design. This allows for embedding smart functionalities within materials, such as shape-morphing capability shown in the Figure (middle).
Currently, shape-morphing materials are mostly actuated by externally applied mechanical loads, such as prescribed displacements applied to the entire specimen. An example of such a folding material designed to absorb impact energy is shown in the Figure (middle). Within this project, we will focus on computational design and manufacturing through 3D printing of shape-morphing scaffolds that can achieve similar shape change as the material shown in the Figure (middle), but triggered by applications of external magnetic fields. The tasks within this project will involve, but are not limited to:
Build a FEM model of a 2D/3D shape-morphing magnetic materials, based on [2].
Design and optimization of scaffold’s geometry to achieve required shape-morphing functionality, using the FEM framework and topology optimization, see the Figure (right) and also [4].
Manufacturing of the resulting designs using 3D printing technology and validation of the numerical model against experimental data.
References
[1] Y. Kim, H. Yuk, R. Zhao, S. A. Chester, and X. Zhao, ‘Printing ferromagnetic domains for untethered fast-transforming soft materials’, Nature, vol. 558, no. 7709, Art. no. 7709, Jun. 2018, doi: 10.1038/s41586-018-0185-0.
[2] C. Coulais, A. Sabbadini, F. Vink, and M. van Hecke, ‘Multi-step self-guided pathways for shape-changing metamaterials’, Nature, vol. 561, no. 7724, pp. 512–515, Sep. 2018, doi: 10.1038/s41586-018-0541-0.
[3] R. Zhao, Y. Kim, S. A. Chester, P. Sharma, and X. Zhao, ‘Mechanics of hard-magnetic soft materials’, Journal of the Mechanics and Physics of Solids, vol. 124, pp. 244–263, Mar. 2019, doi: 10.1016/j.jmps.2018.10.008.
[4] C. Wang, Z. Zhao, and X. S. Zhang, ‘Inverse design of magneto-active metasurfaces and robots: Theory, computation, and experimental validation’, Computer Methods in Applied Mechanics and Engineering, vol. 413, p. 116065, Aug. 2023, doi: 10.1016/j.cma.2023.116065.
