Robot skins are flexible layers or surfaces integrated with sensors, enabling robots to detect touch, pressure, and environmental stimuli. They mimic the sensory functions of human skins, facilitating robots’ interactions with objects and humans.
Metamaterials are artificially engineered materials with unique properties which conventional materials found in nature typically do not possess. Metamaterials can be designed to manipulate mechanical behavior such as absorbing mechanical forces and impacts or creating deformation patterns.
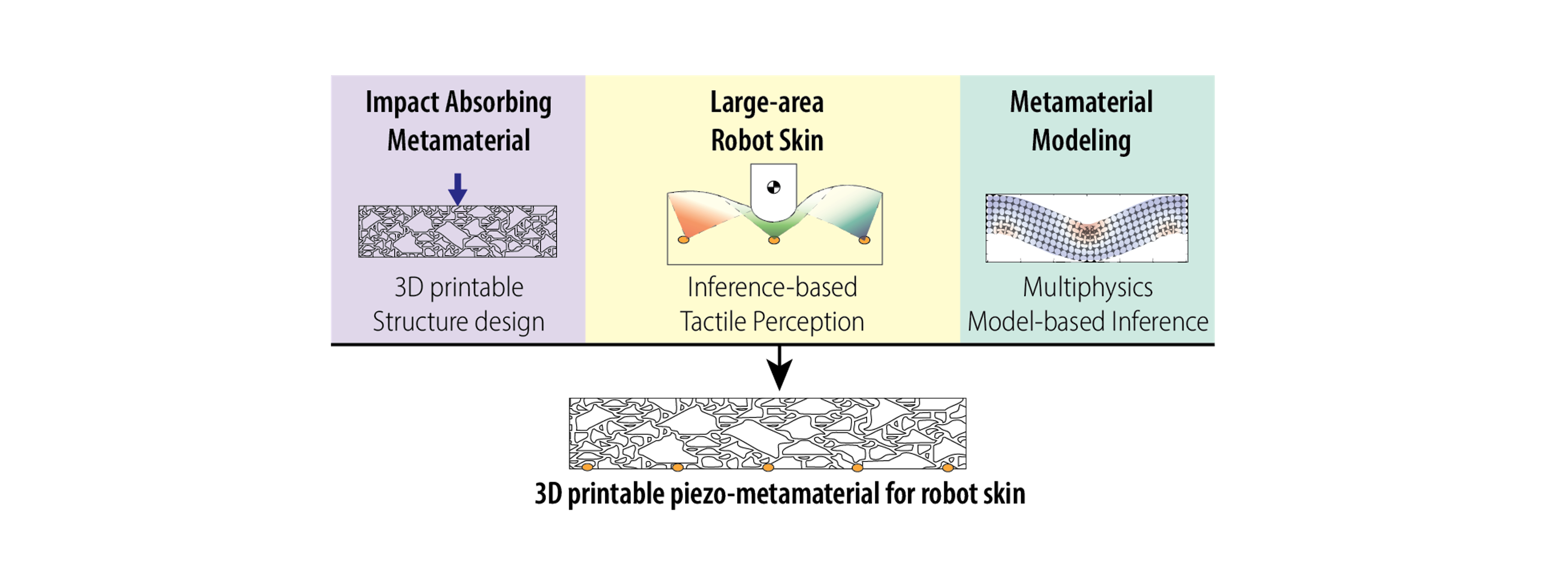
This graduation project aims to develop a new class of robotic skins that seamlessly integrate high-sensitive tactile sensing with superior impact absorption by investigating mechanical sensor-embedded meta-materials. Three faculty members from the Mechanics of Materials section (MoM) and Robotics section (RBT) will be co-supervising this project, making it highly inter-disciplinary by combining state-of-the art soft robot skin [1], impact absorbing metamaterials [2], and modeling and simulation of these types of materials [3]. The tasks within this project will involve, but are not limited to:
Investigate 3D-printable metamaterials with piezo-characteristics.
Explore metamaterial structures for tactile sensing and impact absorption.
FE methods for structural topology optimization.
The following apects will be used and/or developed during this project: soft robotics and innovative material design; mechatronics, materials science, or mechanical engineering; sensor technologies and signal processing; mechanical testing and analysis; 3D printing of materials; finite element methods and computational design tools.
References
[1] Park, Kyungseo, Hyunwoo Yuk, M. Yang, Junhwi Cho, Hyosang Lee, and Jung Kim. "A biomimetic elastomeric robot skin using electrical impedance and acoustic tomography for tactile sensing." Science Robotics 7, no. 67 (2022): eabm7187.
[2] Fox, Chelsea, Kyle Chen, Micaela Antonini, Tommaso Magrini, and Chiara Daraio. "Extracting Geometry and Topology of Orange Pericarps for the Design of Bioinspired Energy Absorbing Materials." Advanced Materials 36, no. 36 (2024): 2405567.
[3] Rokoš, O., Ameen, M. M., Peerlings, R. H. J. & Geers, M. G. D. Extended micromorphic computational homogenization for mechanical metamaterials exhibiting multiple geometric pattern transformations. Extreme Mechanics Letters 37, 100708 (2020).
